graspPlugin のインストールとビルド
glaspPlugin のインストール手順を以下に記す。
必須ソフトウェアのインストール
glaspPlugin のインストールに先立ち、OpenRTM と Choreonoid をインストールする必要がある。加えて、wx-common パッケージをインストールする。
% sudo apt-get install wx-common
wx-commonパッケージがないと、ccmakeのconfigureにおいて、wxWidgets_wxrc_EXECUTABLE が NOT FOUND になって失敗する。
これらがすでにインストール済みであれば、この項はスキップして graspPlugin インストール から作業を始めることができる。
graspPlugin インストール
graspPlugin は Choreonoid のプラグインとして提供される。
graspPlugin ソースの展開
以下のサイトにブラウザからアクセスする。
https://code.google.com/p/grasp-plugin/downloads/list
ここで、graspPlugin-1.3.zip ならびに、PRM-1.3.zipをダウンロードする。
graspPluginのソースを ~/src/choreonoid-1.3.1 の extplugin 以下に展開する。
% cd ~/src/choreonoid-1.3.1/extplugin % unzip graspPlugin-1.3.zip
PRMプラグインのソースを~/src/choreonoid-1.3.1 の extplugin/graspPlugin 以下に展開する。
% cd ~/src/choreonoid-1.3.1/extplugin/graspPlugin % unzip PRM-1.3.zip
なお、開発者は https://grasp-plugin.googlecode.com/svn/trunk/graspPlugin を利用できる。
必須パッケージをインストール
graspPlugin のインストールスクリプトを実行する。(ユーザーパスワードが必要)% ./graspPlugin/Grasp/install-requisities-ubuntu.sh
ccmake を使ったビルド
graspPlugin をプラグインとして導入するため、ccmake で Choreonoid のビルド設定を変更する。
% cd ~/src/choreonoid-1.3.1 % ccmake .
graspPlugin をビルドするには、ここでccmake で項目を編集する必要がある。
ccmake では、画面の左半分に白地で表示される項目がキーで、右半分に黒地で表示される項目がキーに対する値となる。
上下のカーソルキーを使って目当ての項目に移動したら、エンターキーを押すと値を編集することができる。
値を修正したら、もう一度エンターキーを押すと、再びカーソルキーを上下に動かせるようになる。
2度cキーを押して configure すると、GRASP_PLUGINS と GRASP_ROBOT_MODEL_PLUGINS の二つの項目ができる。
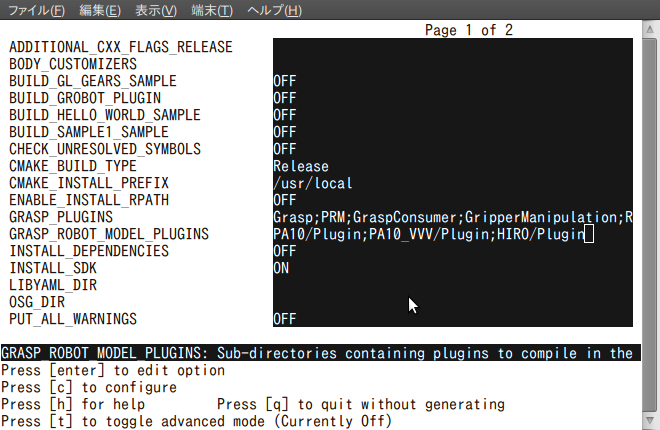
例えば、双腕ロボットHIROによるピックアンドプレースの場合、
- キー GRASP_PLUGINS
- 値 Grasp;PRM;GripperManipulation;VisionTrigger;RobotInterface
- キー GRASP_ROBOT_MODEL_PLUGINS
- 値 HIRO/Plugin
- キー GRASP_PLUGINS
- 値 Grasp;PRM
- キー GRASP_ROBOT_MODEL_PLUGINS
- 値 PA10/Plugin
となる。目的とするプラグインが依存しているプラグインについては、各プラグインの解説の中に依存プラグインとして記述している。
値を編集したら、「c」キーを押して configure を行う。
数秒後に configure が無事に終了すると、画面の下のキーメニューに新しく「Press [g] to generate and exit」の項目が出る。

「g」キーを押すと、makefileが生成され、ccmake が終了する。
% make
実行
choreonoid を実行する。
% bin/choreonoid
以下のような画面が出たら成功。
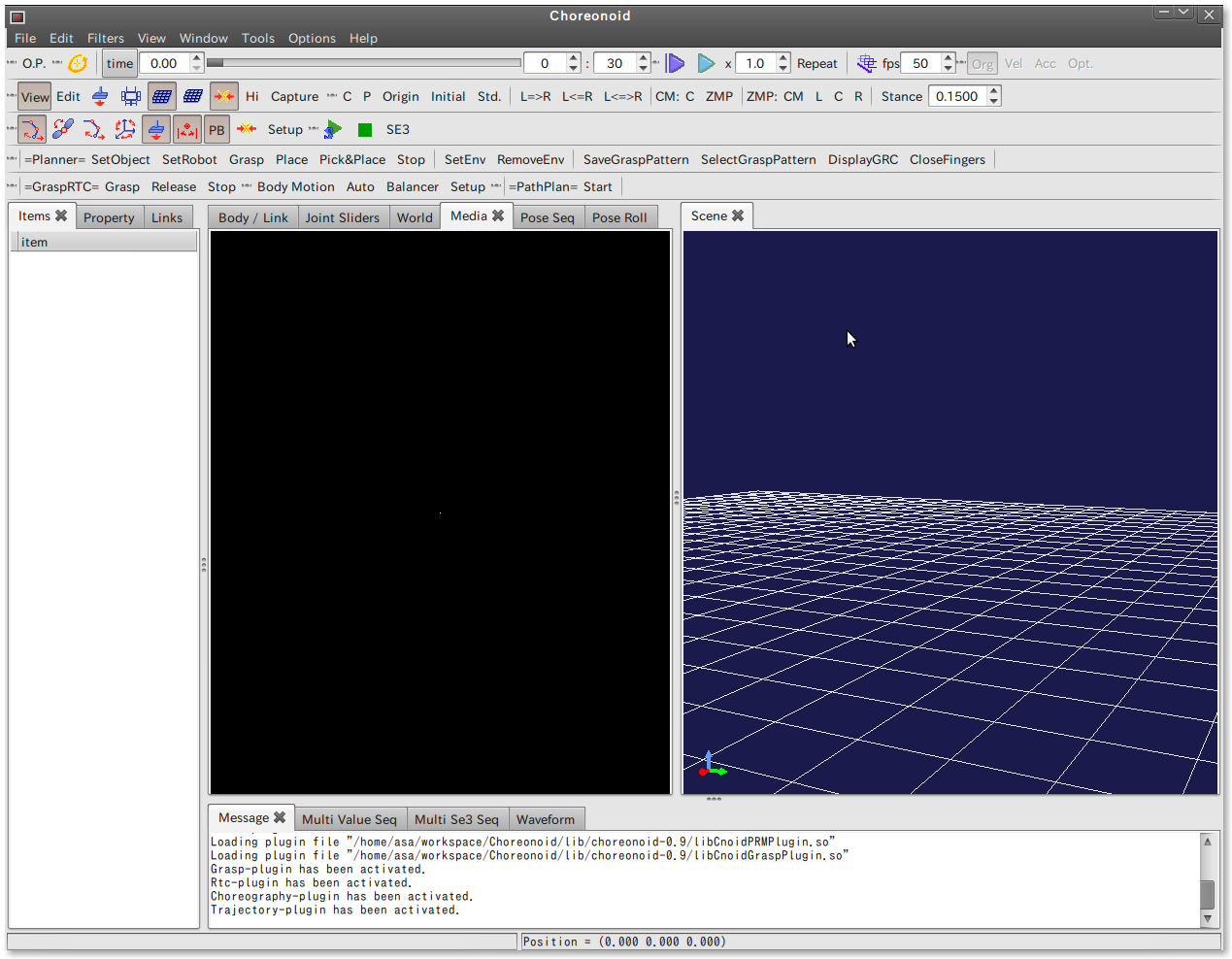
graspPlugin を組み込んだことによって、ツールバーの種類が増えている。
また、Messageタブにもプラグインファイルを読み込み、起動した旨のメッセージが表示されている。