製造現場における組立工程への部品供給作業を自動化するために、対象物(ネジやボルト等)がバラ積みされた箱から一つの対象物をロボットで拾得する問題に取り組んでいます。
バラ積み対象物のピッキングにおける複雑な物理現象は、ピッキングの成否の予測を困難にしているため、本研究では成否の予測に深層学習を導入しています。
さらに、深層学習を用いてこれらを学習するには大規模なデータが必要であるため、我々は効率的に学習データを収集するために物理シミュレータの導入を検討しています。
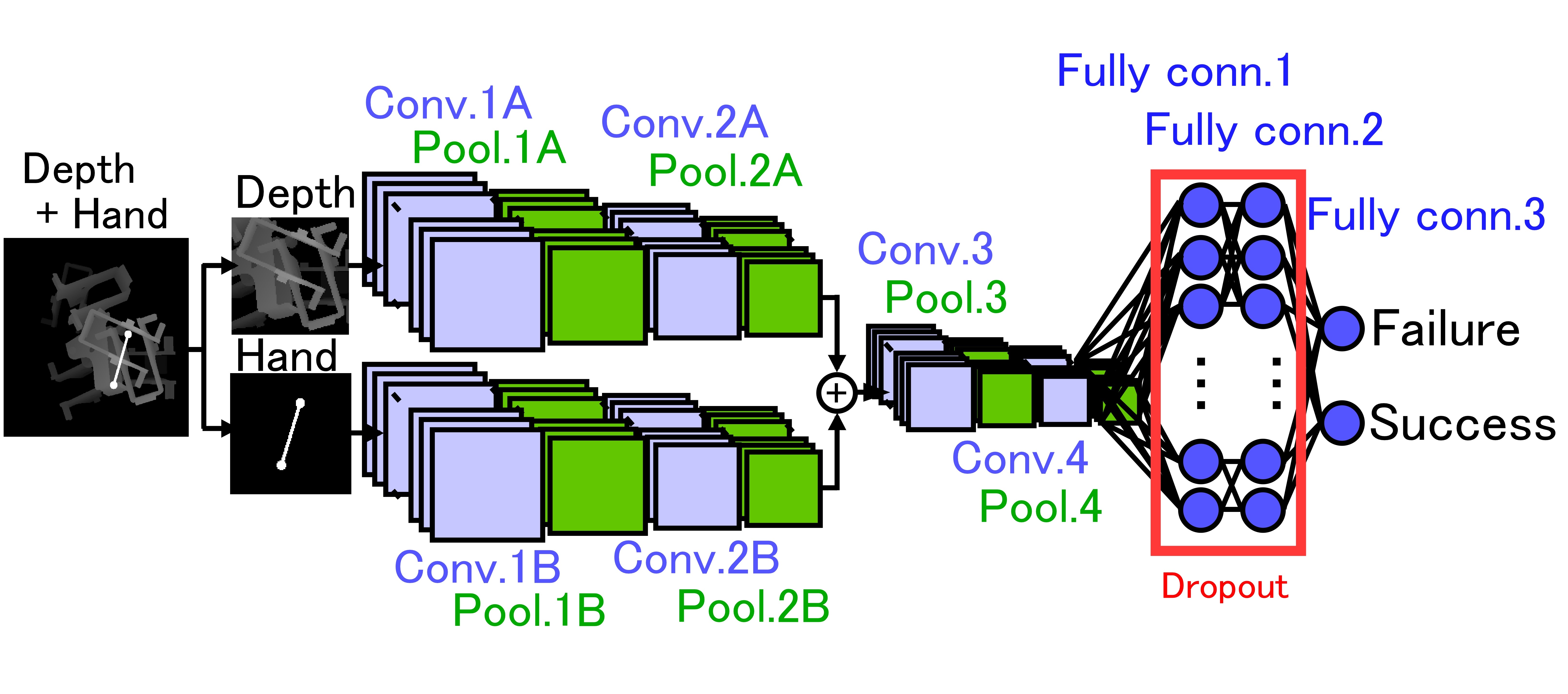
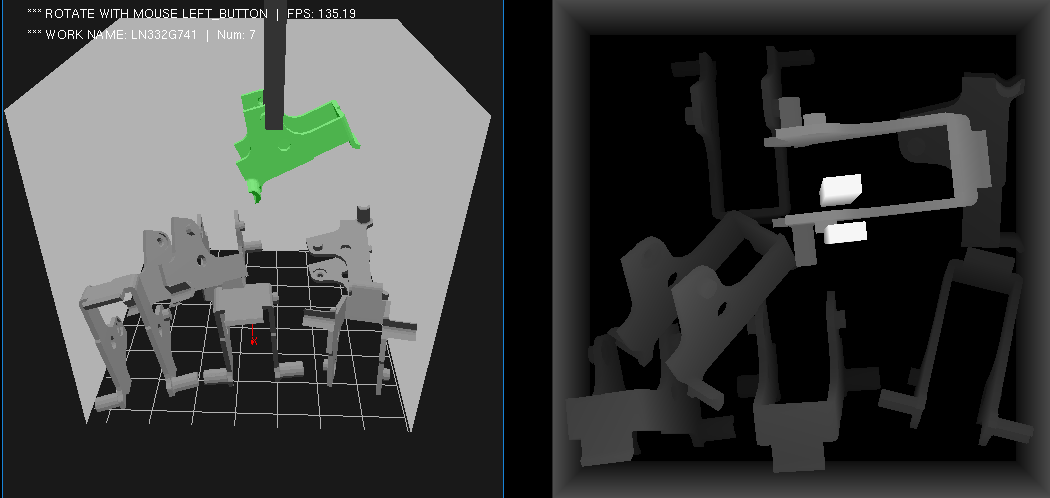
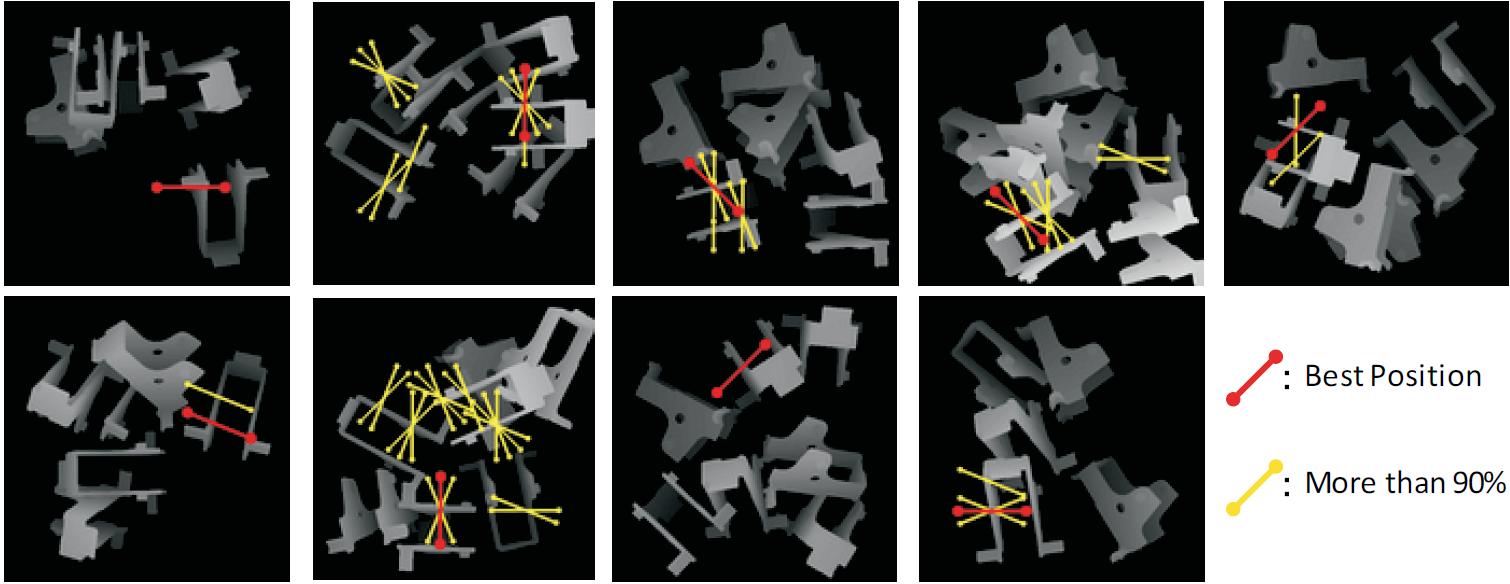
図1には提案するCNN(Convolutional Neural Network)の概略を、図2には使用する物理シミュレータを、また図3には学習済みCNNを用いて構築した把持可能位置検出モデルを利用して、未知のデータに対して推定を行った結果を示しています。