top profile study(ここ) hobby test link
研究分野はロボットマニピュレーションを専攻しており、産業用ロボットを用いたFA化(Factory Automation)を目指した研究を行っています。
特に、ロボットによる部品の組み立て作業におけるエラー予測を機械学習を用いて行う研究をしています。
Conference&Reword
・速水友輔,石培昊,万偉偉,ラミレス・イクシェル,原田研介. "スナップアセンブリにおけるエラーリカバリシステムの構築"ロボティクス・メカトロニクス講演会2018 in Kitakyusyu,ポスター発表,2018年6月,ROBOMECH Journal推薦受賞
・速水友輔,石培昊,万偉偉,ラミレス・イクシェル,原田研介. "Multi-dimensional Error Identification during Robotic Snap Assembly"
The 15th IFToMM World Congress,口頭発表,2019年6月~7月@ポーランド Krakow
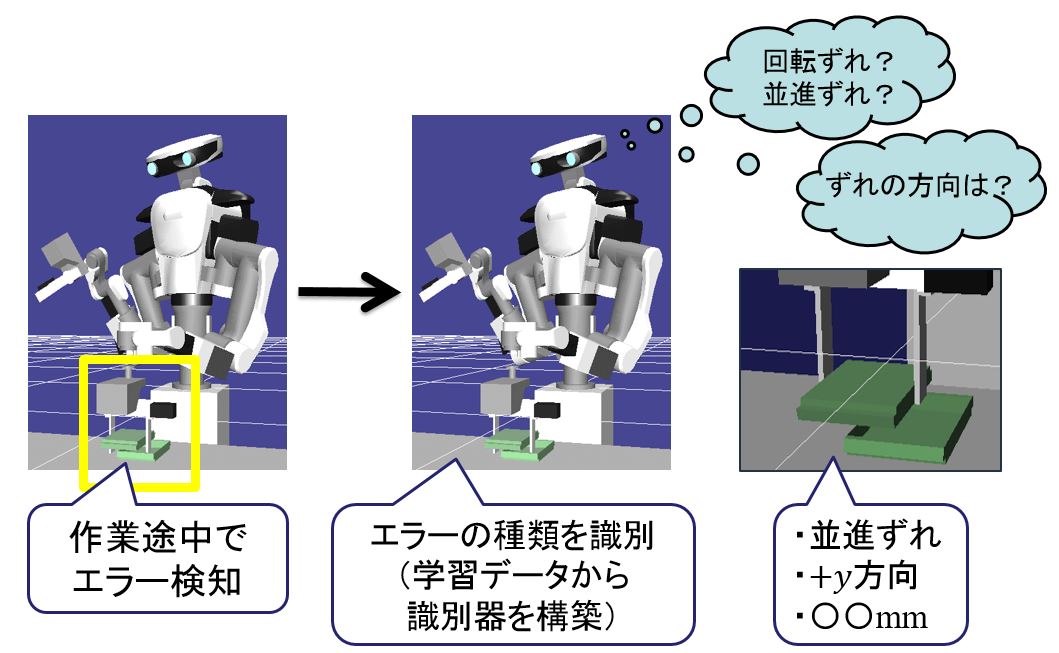
研究概要
製造現場における部品の組み立て作業をロボットにより自動化する事を目指して"スナップアセンブリ"と呼ばれる組み立て作業をテーマとして、
部品のわずかな位置のずれパターンを識別するエラー識別問題に取り組んでいます(Fig.1参考)。
従来手法では、エラーパターン識別は作業終了時にのみ可能でした。
これを作業途中で行うために、 関数主成分分析(Fpca:Functional proncipal component analysis)を導入し、
Fpcaにより 取得された特徴量をSVM(Support Vector Machine)等を用いて学習するシステムを構築しました。(Fig.2参考)
シミュレーション実験にて提案手法の有用性が示唆されており、 現在は、ロボットを用いて実機実験を行いシステムの検証を行っています。
今後は、計算時間の短縮や、深層学習を用いたエラーパターン識別も試したいと考えています。
Fig.1 スナップアセンブリの成功例とずれによる失敗例