graspPluginのインストール方法
1. Choreonoidのインストール
Choreonoid 1.6やChoreonoid1.5のzipファイルを http://choreonoid.org/ja/download.html からダウンロードし,~/srcに展開する。
必要なアプリケーションを以下のコマンドでインストール
% cd ~/src/choreonoid/misc/script % ./install-requisities-ubuntu-14.04.sh (OSに応じてファイル名が異なります)
2. graspPluginのインストール
graspPluginを~/src/choreonoid/ext (Choreonoid1.5以降) , ~/src/choreonoid/extplugin (Choreonoid1.4) 以下に展開する。レポジトリからインストールする場合は、公開レポジトリを参照。
graspPlugin/Grasp, graspPlugin/PCL, graspPlugin/GeometryHandlerなどのディレクトリにinstall-requisities-ubuntu.shのスクリプトファイルがあるので,これらを実行する.
chorenoid1.5以上では、下記のコマンドでextplugin(extへのシンボリックリンク)を作成する。$ cd ~/src/choreonoid $ ln -s ext extplugin
4. OpenRTMのインストール(オプション)
OpenRTMを使用するプラグインを使う場合(RobotInterfaceなど)を使う場合にインストールする.詳細はOpenRTMのサイトで確認する.
OpenRTMのサイト http://www.openrtm.org/openrtm/ja/content/tools より、eclipse toolsの全部入りをインストールする。
5. コンパイル
% cd ~/src/choreonoid % ccmake .
ここで、色々なオプションが出てくるので、目的に合わせて設定する。得に、GRASP_PLUGINS, GRASP_ROBOT_MODEL_PLUGINSはgraspPluginの目的に応じて適切に設定する。また、hrgPluginをインストールした場合はHRGPLUGINS, HRGRobotModelsPluginも同様に設定する。例えば、戦略デモの場合は
GRASP_PLUGINS Grasp;PRM;GeometryHandler;ObjectPlacePlanner;PickAndPlacePlanner;PCL;RobotInterface;GraspDataGen;SoftFingerStability;ConstraintIK
GRASP_ROBOT_MODEL_PLUGIN HIRO/Plugin
HRGPLUGINS
HRGRobotModelsPlugin
のように設定する。また、Choreonoid 1.4の場合は
ENABLE_OSG ON
OSG_DIR /
とし、OpenSceneGraphが使えるようにする。また、Choreonoid1.6の場合には
USE_PYBIND11 OFF
USE_PYTHON3 OFF
USE_QT5 ON
とする。ここで、cを複数回押しながら、更にオプションの設定をする。例えば、PCLプラグインを用いている場合、一回cを押した時点で、BUILD_PCL_PLUGINが現れるので、これをONにする。PickAndPlacePlannerプラグインを用いている場合は、一回cを押した時点でUSE_DB_IN_PICKANDPLACEが現れる。戦略デモに関してはこれをONにする。(2011国際ロボット展デモではOFF) 更にcを押し、最後にgを押してMakefileを生成させる。最後にコンパイルする。例えば、5並列でコンパイルしたい場合は、以下のコマンドを用いる。
% make -j5
Ubuntu16.04でPCLプラグインを使用する場合:
Qt5を使用する必要があります。ccmake時にUSE_QT5という項目があるので、これをONにしてください。
6. コンパイルのTips
Ubuntu 14.04でChoreonoid1.4をコンパイルする際は、choreonoid/src/Util/Reference.hの以下の2行をコメント
//#include <boost/atomic.hpp>
//#define CNOID_REFERENCED_USE_ATOMIC_COUNTER
(http://openscenegraph.alphapixel.com/osg/downloads/free-openscenegraph-binary-downloads )からLinux 3 .0 .1 64bitの所にある
OpenSceneGraph-3.0.1-Ubuntu-x64-release-12741.7zをダウンロードする。これを適当なディレクトリに展開する。
展開して生成されたディレクトリ中にlib64ディレクトリがあるので、この名前をlibに変更する。
ccmake時のOSG_DIR に展開して生成されたディレクトリのパスを設定する。
※7zが展開できない時はp7zipをインストール
% sudo apt-get instlall p7zip
7. その他のTips
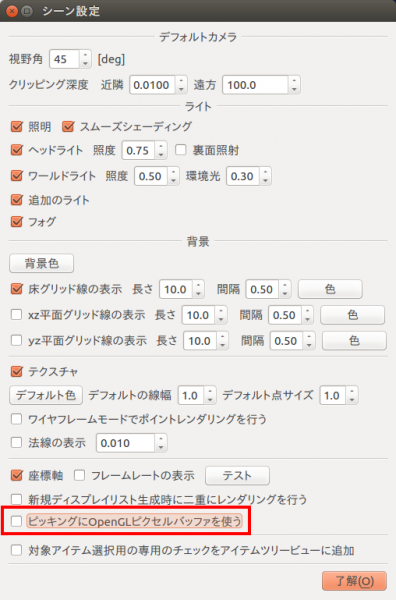
Ubuntu16.04、Choreonoid1.5、Qt5の環境で、Choreonoid上のシーンタブでダブルクリックをしてもオブジェクトを選択できない現象が起こりました。
以下の方法で解決ができます。
まず、シーンバーの設定ダイアログを開きます。(下図中赤枠)

「ピッキングにOpenGLピクセルバッファを使う」のチェックをはずし、「了解」ボタンを押します。
以上
- Printer-friendly version
- Login to post comments