graspPlugin(en)
Fri, 01/13/2012 - 17:28 — asahigraspPlugin for Choreonoid
graspPlugin is a software for robot systems having a robotic hand at the tip of a robotic manipulator. By using the graspPlugin, we can solve several planning problems such as the grasp planning, the trajectory planning and the task planning. To solve several planning problems for several configurations of robot systems, the software should be flexibly customizable. So as to flexibly customize the software, the graspPlugin is developed as a set of plug-ins of Choreonoid. Here, Choreonoid is a software originally developed for choreographing the motion of a humanoid robot in OpenRT Platform project. The merit of using Choreonoid is that we can extend the functions of Choreonoid developed so far. For example, we can use the basic functions of Choreonoid such as the math library, the robot kinematics description, and the collision detection function.
We would like to note that we ported the MPK (Motion Planning Kit) developed in Stanford university as a plug-in to plan the collision-free trajectory. By the kindness of Prof. Jean-Claude Latombe, we can include MPK as a part of the graspPlugin. When you download the graspPlugin, we would be happy if you send an e-mail to grasp-plugin-webmaster[at]m.aist.go.jp (please replace [at] by @) describing the name and the affiliation. Then we can collect the the personal information of the users of MPK.
Also, if you want to join the developers team of graspPlugin and want to share the developed plug-in, please let us know too.
Developers:
Tokuo Tsuji(Kyushu univ. / AIST)
Kensuke Harada(AIST)
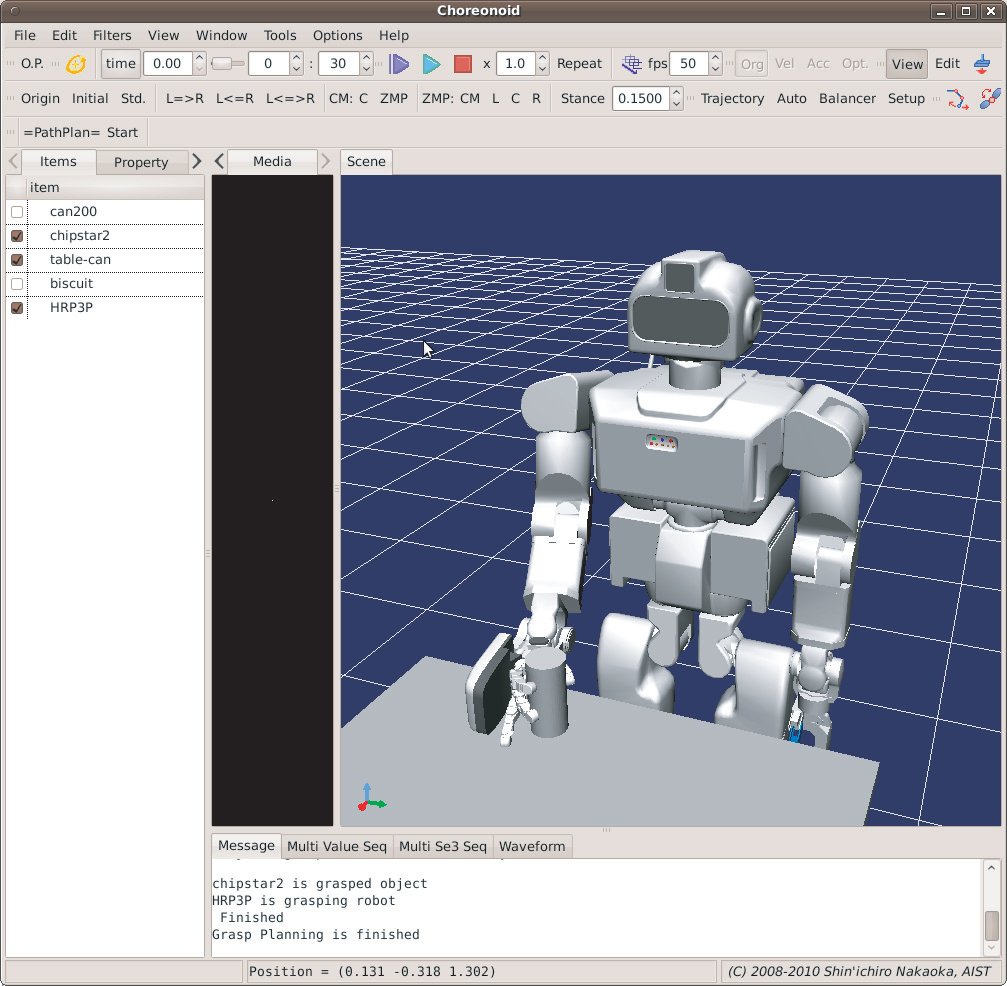
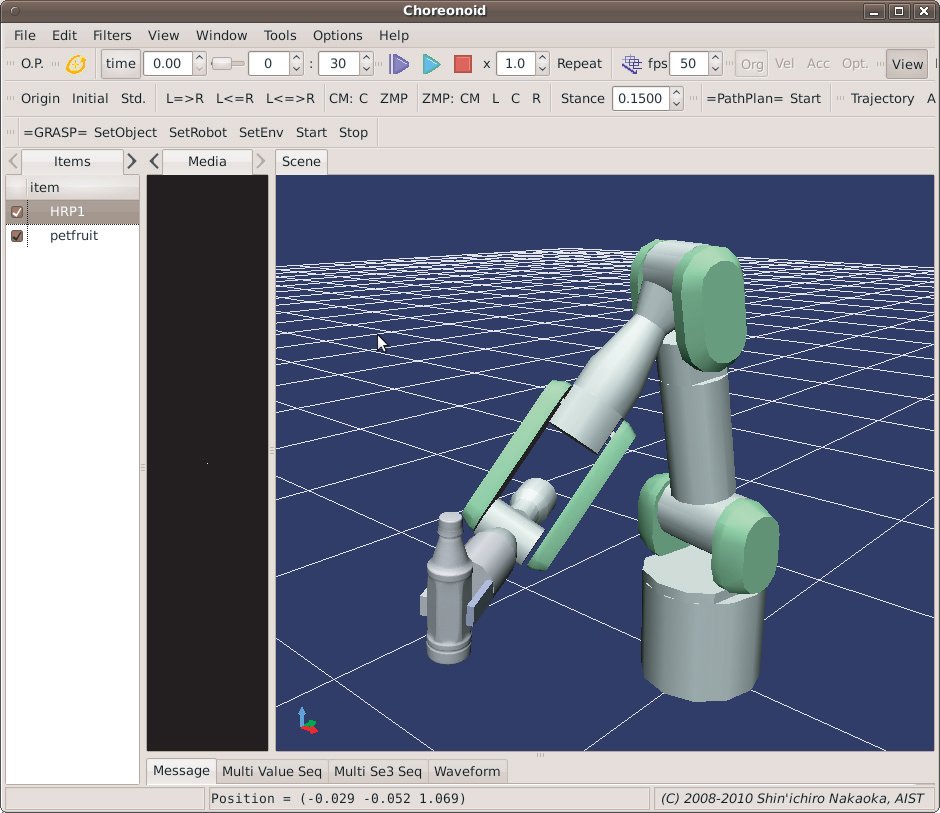
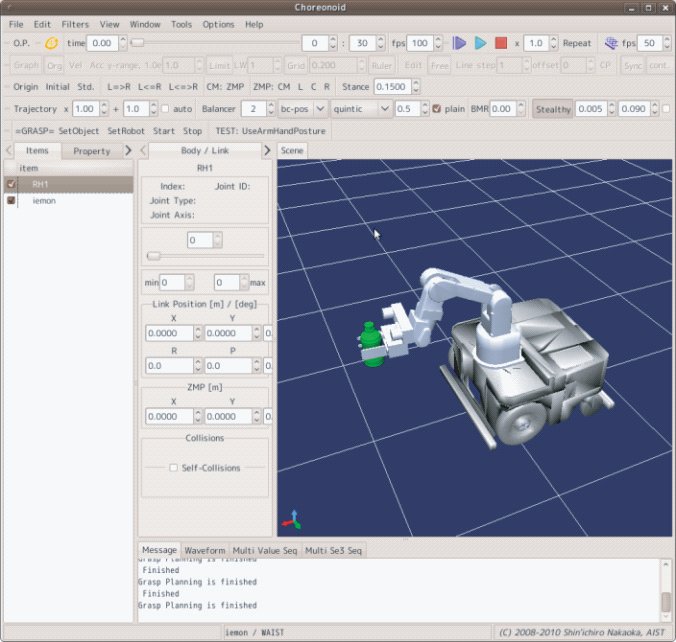
In the following, we show the result of grasp planning for the humanoid robot HRP-3, PA10, and RH-1 developed in the NEDO project.
List of plug-ins
| Name | Abstract | Remarks |
|---|---|---|
| Grasp | Grasp planning for multi-fingered hand. Basic functions commonly used by other plug-ins. | Grasp planning is applicable for PA10, HRP3 Hand, SmartPAL-5, RH1 |
| PRM | Trajectory planning avoiding collision with obstacles. | Ported MPK(Motion Planning Kit developed in Stanford university. |
| GraspConsumer | OpenRTM consumer for Grasping motion planning module developed in the NEDO project. | |
| VisionTrigger | OpenRTM interface connecting with OpenVGR. | Rewritting the position/orientation of the object defined in the Grasp plug-in. |
| RobotInterface | Providing functions to control robots. | Applicable for HIRO using OpenRTM interface. |
| RobotModels | Database of robot geometrical models and functions used for each robot. | HIRO, PA10, HRP2, HRP3, SmartPAL, RH1(Only PA10 is available for the release version) |
| GeometryHandler | Analysis of the geometry models such as VRML. | Generating the parameter files used in the grasp planning (Not included in the released version). |
| GripperManipulation | Pick and place planning for parallel grippers. | Applicable for HIRO and PA10. (Limited function for the released version) |
| RtcGraspPathPlan | Sequencially planning the grasp planning and the trajectory planning and send the joint trajectory with OpenRTM interface. | Used in the H23 NEDO project (Not included in the released version) |
| EditModel | Edit the shape of a rectangular. | Used when introducing a new hand model in Grasp plug-in. |
| PCL | Interface with the Point Cloud Library. | (Not included in the released version) |
| RosInterface | Interface with ROS. |