- graspPlugin
- 公開レポジトリ
- graspPluginのインストール方法
- graspPluginのWindowsへのインストール方法 (Choreonoid 1.5)
- CnoidRosプラグイン
- ConstraintIKプラグイン
- GeometryHandlerプラグイン
- Grasp プラグイン解説
- GraspConsumer プラグイン解説
- Graspプラグイン把持姿勢DB生成機能
- MotionFileのコマンド
- MotionFileプラグイン
- Motionタブの使用方法(choreonoid 1.5)
- Motionファイルの作成
- PCL, PCL.rtcプラグイン
- PCLプラグイン位置・姿勢推定機能
- PRM プラグイン解説
- PRMプラグイン
- PickAndPlacePlannerプラグイン
- RobotInterface プラグイン解説
- RobotInterfaceプラグインへのツールチェンジ機能の追加について
- RtcGraspPathPlanプラグイン
- SoftFingerStabilityプラグイン
- kinectキャリブレーション
- pythonスクリプトpythonインターフェース
- フィッティング機能
- 固定されたデプスセンサでのばら積みピッキング
- 把持姿勢補間・配置位置探索
- 把持計画パラメータ設定方法
- Choreonoid プラグインプログラミング Tips
- Downloads
- 古い情報
graspPlugin
金, 02/04/2011 - 12:01 — asahi
graspPlugin for Choreonoid
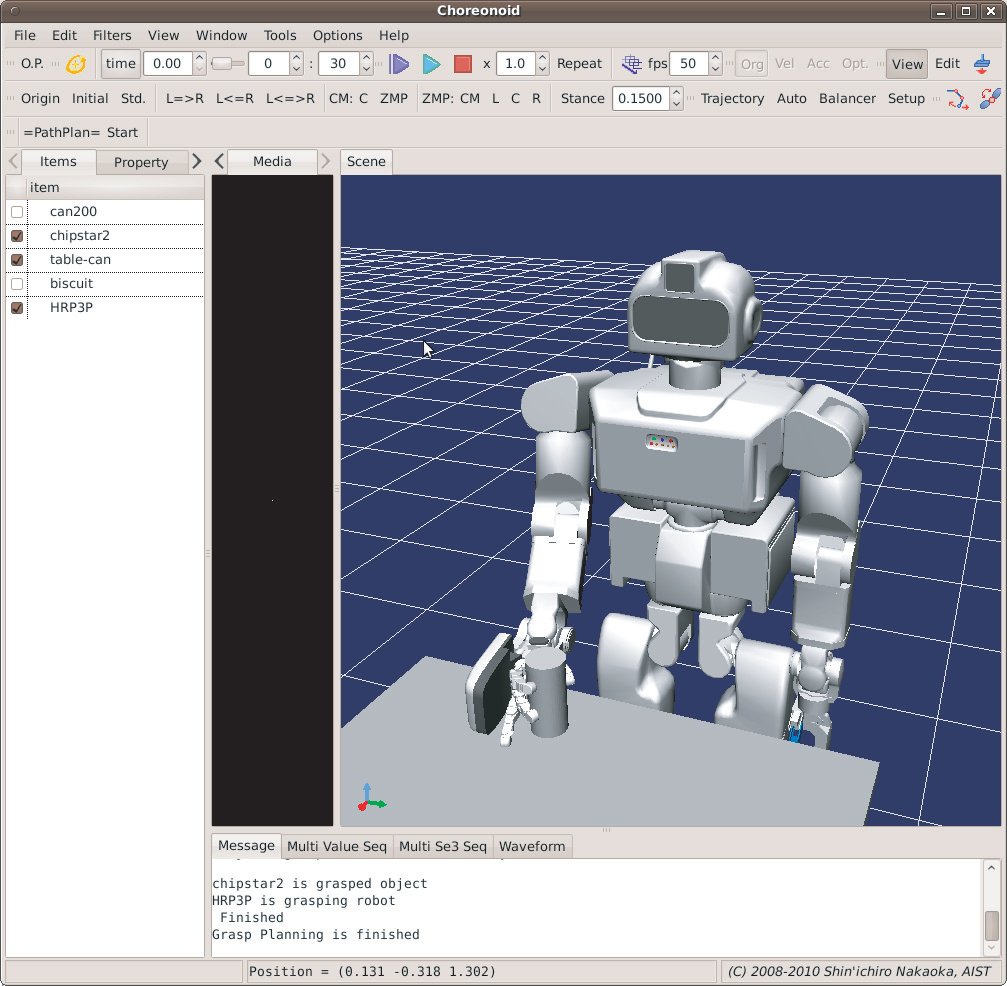
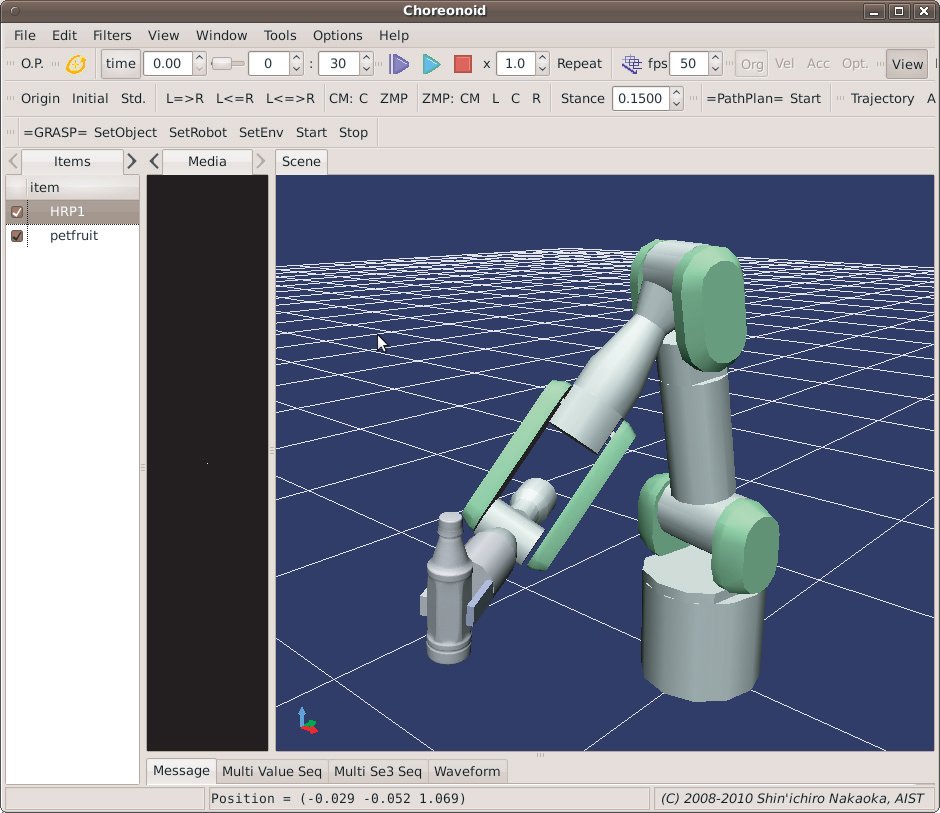
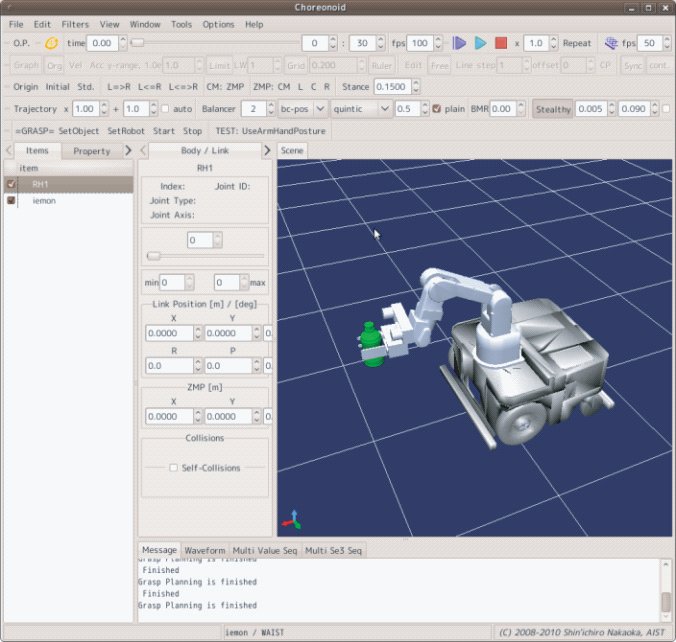
graspPluginは、アームの先端にハンドが取り付けられた構成のロボットシステムに対して、把持計画、軌道計画、作業計画など、種々の計画問題を解くことが出来るソフトウェアです。種々のロボットに対して種々の計画問題を解くために、ソフトウェアは再利用性が高いことが要求されます。例えば、グリッパをとってみても、平行グリッパ、回転グリッパ、片側可動、両側可動など種類が異なる多種のグリッパが存在します。graspPluginはロボットの仕様や作業目的に応じて拡張や機能をカスタマイズできるように、ロボット動作振り付け統合ソフトウェア Choreonoid をフレームワークとして用い,このプラグインとして個々のソフトウェアモジュールを開発しています。
なお、軌道計画を行うプラグインとしてスタンフォード大学で開発されたMPK(Motion Planning Kit)をポートしたもの、PRM, RRT, RRT*をgraspPlugin for Choreonoidでは用いることができます。このMPKはJean-Claude Latombe教授のご厚意でサイトにアップロードしているもので、そのライセンスはMPK本体のライセンスに従います。
詳しい使い方は、ContentsのgraspPluginのリンクをクリックすることでみることができます。
開発チーム
辻 徳生(金沢大)
原田 研介(大阪大学/産総研)
ライセンス
MIT
導入方法
graspPluginのインストール方法 をご覧ください。
チュートリアル
以下に様々な情報がありますので、必要に応じてみてください。