- graspPlugin
- 公開レポジトリ
- graspPluginのインストール方法
- graspPluginのWindowsへのインストール方法 (Choreonoid 1.5)
- CnoidRosプラグイン
- ConstraintIKプラグイン
- GeometryHandlerプラグイン
- Grasp プラグイン解説
- GraspConsumer プラグイン解説
- Graspプラグイン把持姿勢DB生成機能
- MotionFileのコマンド
- MotionFileプラグイン
- Motionタブの使用方法(choreonoid 1.5)
- Motionファイルの作成
- PCL, PCL.rtcプラグイン
- PCLプラグイン位置・姿勢推定機能
- PRM プラグイン解説
- PRMプラグイン
- PickAndPlacePlannerプラグイン
- RobotInterface プラグイン解説
- RobotInterfaceプラグインへのツールチェンジ機能の追加について
- RtcGraspPathPlanプラグイン
- SoftFingerStabilityプラグイン
- kinectキャリブレーション
- pythonスクリプトpythonインターフェース
- フィッティング機能
- 固定されたデプスセンサでのばら積みピッキング
- 把持姿勢補間・配置位置探索
- 把持計画パラメータ設定方法
- Choreonoid プラグインプログラミング Tips
- Downloads
- 古い情報
把持姿勢補間・配置位置探索
木, 07/17/2014 - 12:53 — ohchi
ここでは把持姿勢補間・配置位置探索について説明します。
この機能はピックアンドプレースに失敗したときに使用することを想定しています。
1.使用方法
1.対象ロボットに"SetRobot",対象オブジェクトに"SetObject"をしておきます。
配置させたい位置をCtrl+クリックします。(対象位置に矢印が表示されます)
2.この状態でManipバーのDebugボタンをクリックします。
把持姿勢補間・配置位置探索が実行されます。
終了するまで数分掛かります。
3.配置可能な位置の探索に成功するとextplugin/graspPlugin/ObjectPlacePlannner/data/data_put.matに位置情報が記録され、以降のピックアンドプレースではこの情報を利用することになります。
把持姿勢補間に成功すると対象オブジェクトの把持DBにピックアンドプレース可能な把持姿勢が追加されます。
把持姿勢補間・配置位置探索に失敗した場合は、ピックアンドプレースに失敗した原因がメッセージウィンドに表示されます。
2.把持姿勢補間・配置位置探索方法
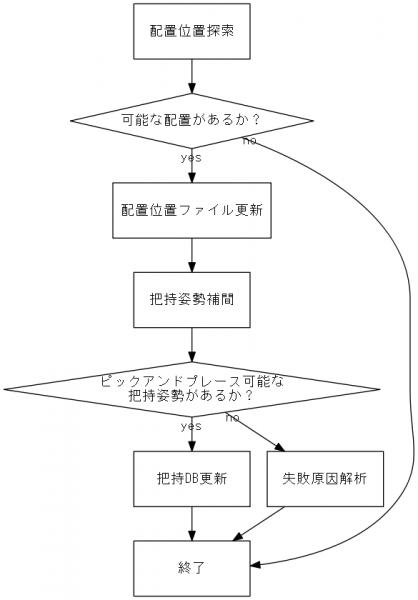
2.1.全体フロー
把持姿勢補間・配置位置探索は下図の手順となっています。