Research on Grasp/Manipulation
Presentation materials on my recent results are available on SlideShare
Base Position Planning for Dual-arm Mobile Manipulators Performing a Sequence of Pick-and-place Tasks
2015 IEEE-RAS Int. Conf. on Humanoid Robots : Base Position Planning for Dual-arm Mobile Manipulators Performing a Sequence of Pick-and-place Tasks from Kensuke Harada
A Manipulation Motion Planner for Dual-Arm Industrial Manipulators
2014 IEEE Int. Conf. on Robotics and Automation : A Manipulation Motion Planner for Dual-arm Industrial Manipulators from Kensuke Harada
2014 IEEE Int. Symposium on System Integration (SII) : Project on Development of a Robot System for Random Picking -Grasp/Manipulation Planner for a Dual-Arm Manipulator- from Kensuke Harada
| For more information |
Pick and Place Motion Planner for Dual-Arm Manipulators
 |
1. Pick-and-place motion planner composed of the offline and the online phases is proposed. 2. The offline phase calculates a set of regions on the object/environment surface. 3. The online phase plans the grasping posture, the object pose placed on the environment, the dual-arm manipulation strategy, and the trajectory between the initial and the final postures of the robot. 4. The effectiveness of the proposed method is confirmed by the experiment of the dual-arm robot HiroNX. For more information |
Object Placement Planner for Robotic Pick and Place Tasks
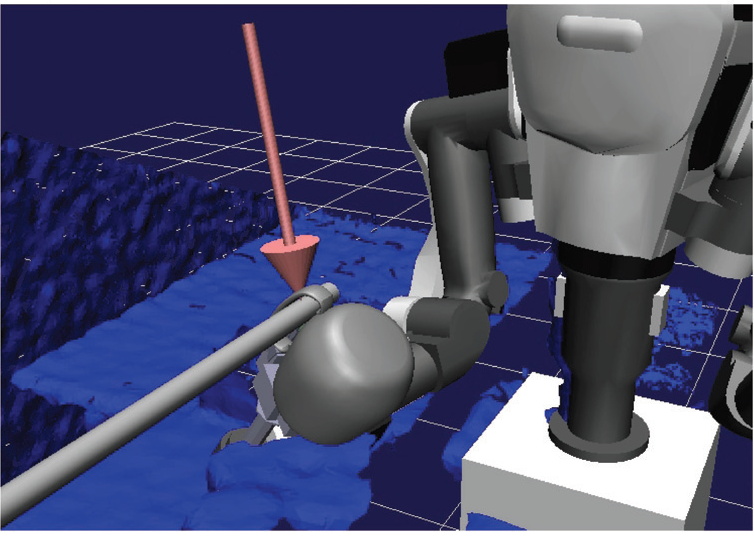 |
1. The proposed planner automatically determines the pose of an object stably placed near a user assigned point on an environment surface. 2. The proposed method clusters the polygon model of both the environment and the object where each cluster is approximated by a planar region. 3. The object placement can be determined by selecting a pair of clusters from the object and the environment. 4. We impose several conditions to determine the pose of the object placed on the environment. For more information |
Probabilistic Approach for Object Bin Picking Approximated by Cylinders
 |
1. This paper proposes a method for object bin-picking for without assuming precise geometrical model of objects. 2. We consider the case where the shape of objects are not uniform but are similarly approximated by cylinders. 3. From the point cloud of a single object, we extract the probabilistic properties with respect to the difference between an object and a cylinder. 4. By using the probabilistic properties, the finger can maintain contact with the target object while avoiding contact with other objects. 5. To realize bin-picking, we approxime the region occupied by fingers by a rectangular parallelepiped. For more information |
Fast Grasp Planning for Hand/Arm Systems Based on Convex Model
 |
1. By the geometrical relashionship between convex models, we can easily define several grasping parameters. 2. Using the new approximation model and random sampling, calculation time can be reduced. 3. Several numerical examples are shown to confirm the effectiveness. For more information |
Research on Robotic Assembly
Snap Assembly System (Collaboration with Prof. Juan Rojas with SYSU, former postdoc of AIST)
 |
1. Constructed force controller based on the control basis approach for snap assembly 2. Assembly state identification based on force sensor information during snap assembly For more information |
Research on Humanoid Motion Generation
Whole Body Motion Planning for Biped Humanoid Robots
 |
1. Whole body motion planner combined with biped walking pattern generator 2. Motion Planning for Legged Robots on Varied Terrain 3. Simultaneous whole-body-motion/foot-step planner for biped humanoid robots For more information |