Object Placement Planner for Robotic Pick and Place Tasks
|
This paper proposes an object placement planner
for a grasped object during pick-and-place tasks. The proposed
planner automatically determines the pose of an object stably
placed near a user assigned point on an environment surface.
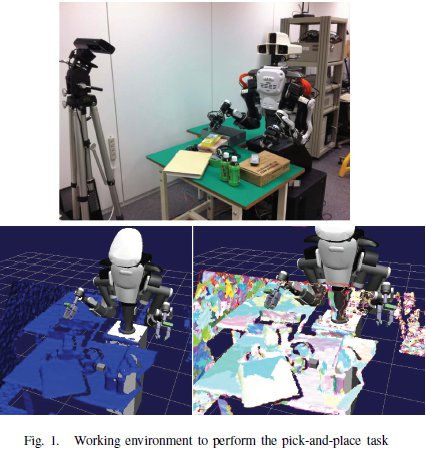
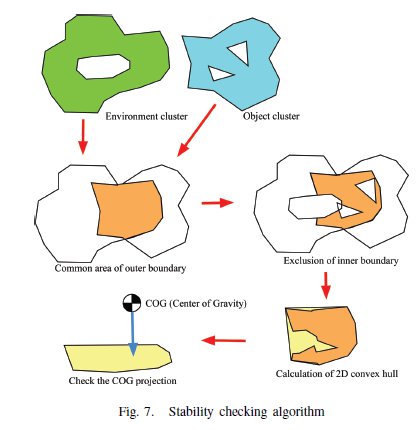
The proposed method first constructs a polygon model of
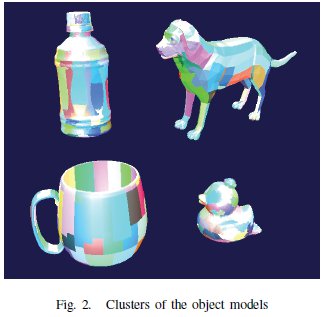
the surrounding environment, and then clusters the polygon
model of both the environment and the object where each
cluster is approximated by a planar region. The placement
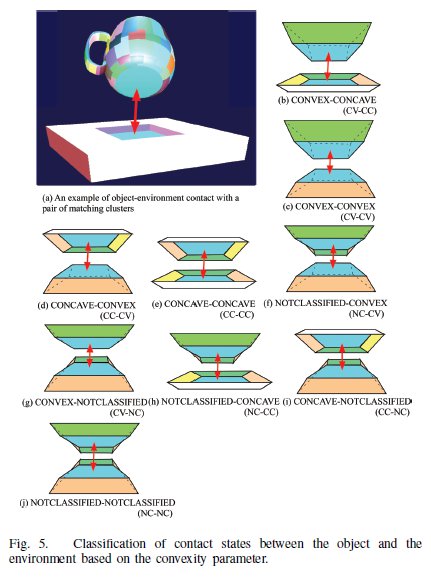
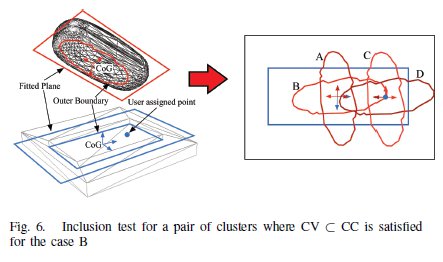
of the object can be determined by selecting a pair of clusters
between the object and the environment. We further impose
several conditions to determine the pose of the object placed
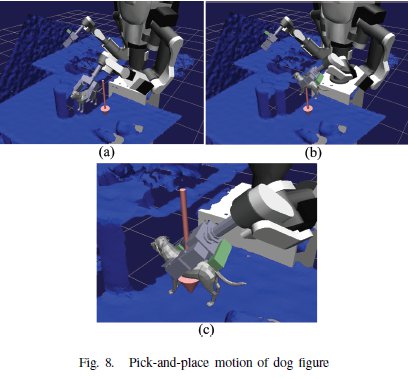
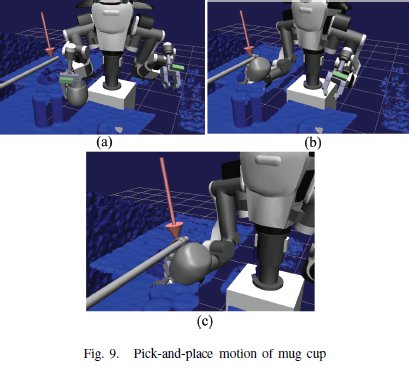
on the environment. We show that we can determine the
position/orientation of the object placed on the environment
for several cases such as hanging a mug cup on a bar. The
effectiveness of the proposed research is confirmed through
several numerical examples.
Paper: IROS2012 |
 |
 |
|
 |
|
 |
|
 |
|
 |
|
 |