GripperManipulationプラグイン をRTコンポーネントに改造する(未完)
Choreonoid/extPlugin/graspPlugin/GripperManipulation というプラグインに、RTコンポーネントの「口」を取り付ける。
オリジナルの GripperManipulation について
双腕ロボットの把持計画を行う Grasplan プラグインであり、ファイル構成は以下のようになっている。
- CMakeLists.txt cmake 定義ファイル
- GripperManipulationMain.cpp Choreonoidプラグイン ManipPlugin クラスのソース
- ManipBar.cpp Choreonoid ツールバー ManipBar クラスのソース
- ManipBar.h Choreonoid ツールバー ManipBar クラスのヘッダ
- ManipController.cpp 把持計画コントローラ ManipController クラスのソース
- ManipController.h 把持計画コントローラ ManipController クラスのヘッダ
- PRM 把持計画データファイルのディレクトリ
ここで、プログラムの構造がわかりやすいよう、GripperManipulationMain.cpp を、ManipPlugin.cpp にリネームする。
合わせて CMakeLists.txt も修正して、コンパイルできることを確認する。
RTC BuilderでRTコンポーネントのスケルトンを作成する
下準備として、まず GripperManipulation の下に rtcディレクトリを作成し、ここに GraspController.idl を置く。
さらに、Eclipse を起動し、このrtc ディレクトリにダミーの新規 Eclipse プロジェクトを設定する。ウィザード選択では「C++ Project」を選び、各項目を以下のように設定する。
- プロジェクト名 GraspControllerRTC
- ロケーション (ユーザーの作業ディレクトリ)/Choreonoid/extplugin/graspPlugin/GripperManipulation/rtc
- Project type: Executable - Empty Project


完了ボタンを押すと、C++ パースペクティブを開きますか? というダイアログが出るが、そのまま閉じればよい。
これで下準備は完了したので、Eclipse で RTC Builder パースペクティブを開く。
RTのアイコンをクリックすると、RtcBuilder ビューが開くので、タブごとに必要な情報を設定していく。
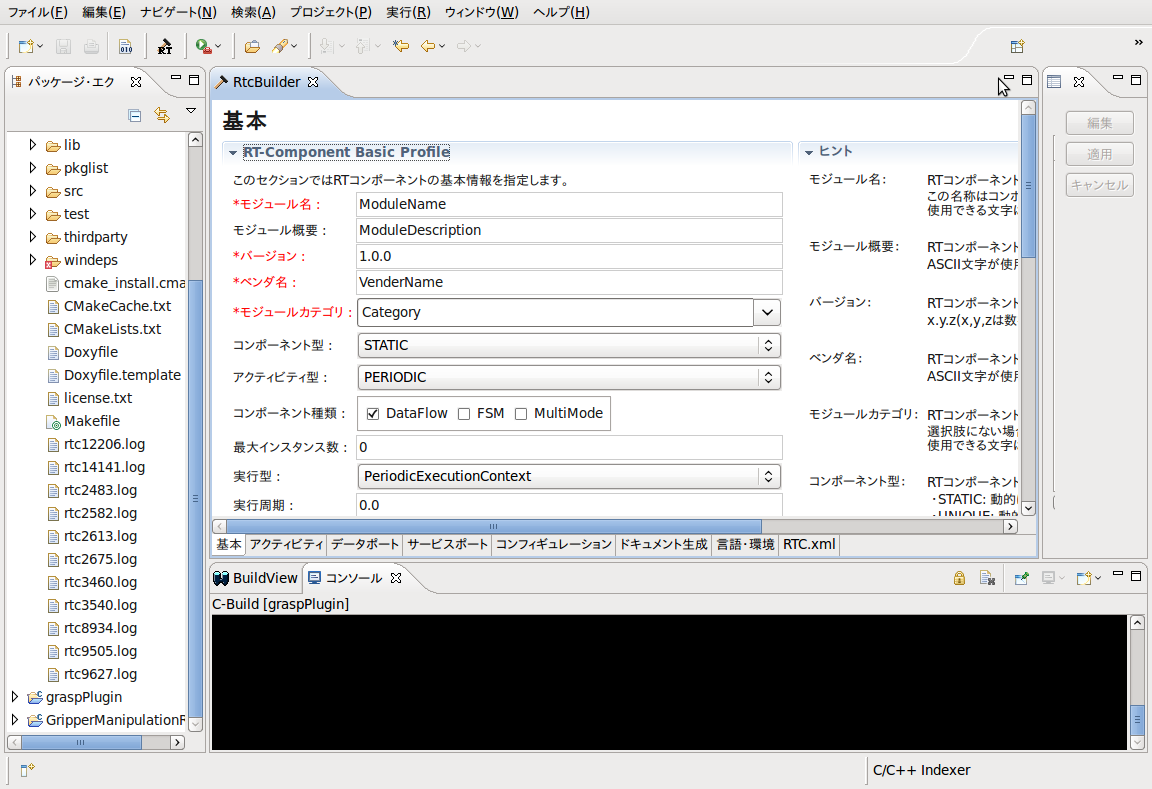
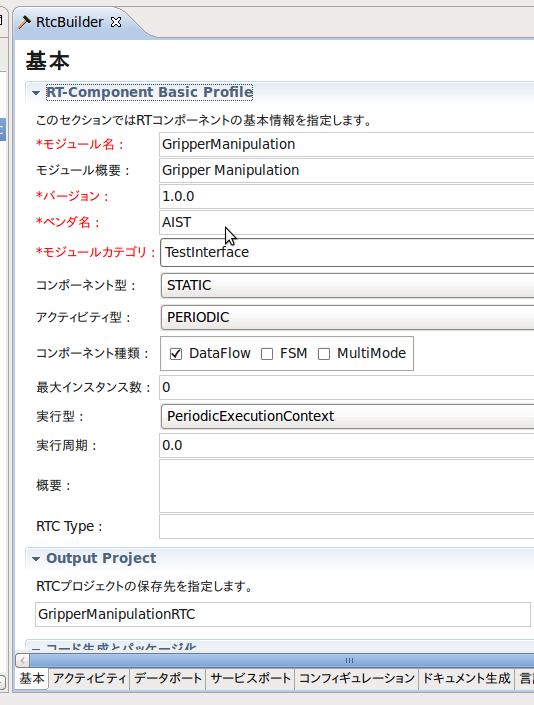
「基本」タブ
- モジュール名 GripperManipulation
- モジュール概要 Gripper Manipulation
- ベンダ名 AIST
- モジュールカテゴリ TestInterface
- Output Project GripperManipulationRTC (先に作成したプロジェクトを選択する)
その他の項目はデフォルトのままでよい。
「言語・環境」タブ
C++を選択する。
「サービスポート」タブ
Add Port ボタンを押す。sv_nameというポートができるので、マウスでクリックして右側にプロファイル設定画面を表示する。
ポート名をPlanStartPortに設定して、今度はAdd Interfaceボタンを押し、新しくできたインターフェースに以下の情報を設定する。
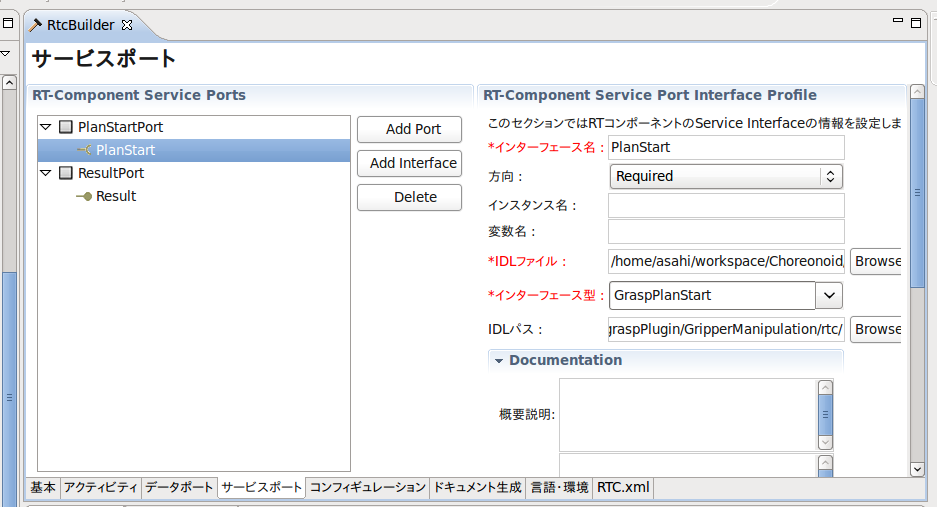
- インターフェース名 PlanStart
- 方向 Required
- IDLファイル /home/asahi/workspace/Choreonoid/extplugin/graspPlugin/GripperManipulation/rtc/GraspController.idl
- インターフェース型 GraspPlanStart(選択項目)
- IDLパス /home/asahi/workspace/Choreonoid/extplugin/graspPlugin/GripperManipulation/rtc/
- インターフェース名 Result
- 方向 Provided
- IDLファイル /home/asahi/workspace/Choreonoid/extplugin/graspPlugin/GripperManipulation/rtc/GraspController.idl
- インターフェース型 GraspPlanResult
- IDLパス /home/asahi/workspace/Choreonoid/extplugin/graspPlugin/GripperManipulation/rtc/
コード生成
以上で RTC Builder の設定は完了である。再び基本タブを開き、コード生成ボタンを押すと、Choreonoid/extPlugin/graspPlugin/GripperManipulation/rtc に、以下のファイルが作られる。
- GraspControllerSVC_impl.cpp
- GraspControllerSVC_impl.h
- GripperManipulation.conf
- GripperManipulation.cpp
- GripperManipulation.h
- GripperManipulationComp.cpp
- GripperManipulationComp_vc8.vcproj
- GripperManipulationComp_vc9.vcproj
- GripperManipulation_vc8.sln
- GripperManipulation_vc8.vcproj
- GripperManipulation_vc9.sln
- GripperManipulation_vc9.vcproj
- Makefile.GripperManipulation
- RTC.xml
- copyprops.bat
- user_config.vsprops
画面の指示にしたがって C++パースペクティブに切り替える。
このとき 一緒に保存されている RTC.xml に、一連の設定が保存されている。
RTコンポーネントの設定を変更する時は、RTC Builderの基本タブの中にある、プロファイルのインポート機能で、この設定を呼び戻すことができる。
rtc をコンパイルする
端末を開いて GripperManipulation/rtc ディレクトリに移って、以下のコマンドを実行する。
% omniidl -bcxx GraspController.idl
GraspController.hh と GraspControllerSK.cc が生成される。
続いて、make を実行する。Makefile を指定する必要がある。
% make -f Makefile.GripperManipulation
これによって、GraspControllerSkel.cpp, GraspControllerStub.cpp, GraspControllerSkel.h, GraspControllerStub.h が生成される。
(コンパイルは通らないが、そのまま進める)
Choreonoid プラグインとRTコンポーネントの橋渡しクラスを作成する
graspPlugin/GraspConsumer から、
GraspRtcController.h と GraspRtcController.cpp を GripperManipulation にコピーして、編集する。
ManipController.h(cpp) とまぎらわしいので、まずファイル名を ManipRtc.h(cpp) に変更する。
サンプルパッチ
サンプルとして、一連のファイル編集を一度に行うパッチファイルを作成した。
% svn co -r131 http://subaru.ait.kyushu-u.ac.jp/svn/grasp-plugin/trunk/graspPlugin/GripperManipulation
として GripperManipulation のリビジョン131をチェックアウトしたあと、RTC Builderの設定を行い、ManipRtc.h(cpp) を作成したところで、パッチファイル GripperManipulation_patch.txt をダウンロードし、
% patch -p0 < GripperManipulation_patch.txt
上のコマンドを実行すると、変更点が一度に適用されるので、ただちにビルドを行える。
以下は、パッチファイルの変更点の概要である。
ManipRtc.h(cpp)
クラス名を ManipRtc に変更する。(Eclipseのリファクタリング機能が便利だが、誤って元のGraspConsumer まで変更しないよう、注意!)
- GraspConsumer.h をインクルードしている部分を、rtc下のGraspController.hh と GripperManipulation.hに変更する。
- comp の型を、GraspConsumer *から、::GripperManipulation * に変更する。
- graspPlanResult の引数で、 const GraspPlanResult となっている部分をすべて::GraspPlanResult に変更する。
- ついでに、インクルードガードの識別子をヘッダ名と合わせて MANIPRTC_H とする。
ManipPlugin.cpp
ManipPlugin::initialize メソッドに、RTコンポーネントをスタートさせるコードを追加する。
virtual bool initialize() {
//Robotics::SceneBodyManager* manager = Robotics::SceneBodyManager::instance();
grasp::GraspController::instance(ManipController::instance());
ManipRtc::instance()->RtcStart();
//manage(manager->addSceneBodyFactory(create));
rtc/GripperManipulation.h
grasp::ManipRtc クラスを、GripperManipulation のフレンドクラスに設定する。
using namespace RTC;
namespace grasp {
class ManipRtc;
}
...
class GripperManipulation
: public RTC::DataFlowComponentBase
{
public:
friend class grasp::ManipRtc;
rtc/GraspControlerSVC_impl.cpp/h
RTCBuilderはIDLデータ型の引数をCORBAとして出力するが、omniidlは同じものを::CORBAとして出力するため、型が異なるとコンパイラがエラーを出してしまう。
そこで、omniidlの出力に合わせて、CORBAネームスペースの型の引数の宣言を、::CORBA に書き換える。
また、GraspPlanResultSVC_impl クラスのメソッドの引数について、GraspPlanStart ネームスペースの型の引数宣言を GraspPlanResult に書き換える。(これはRTCBuilder のバグか)
CMakeLists.txt
- set(rtc-dir ./rtc) を追加
- include_directories(${rtc-dir}) を追加
- sources に ManipRtc.cpp, ${rtc-dir}/GraspControllerSVC_impl.cpp, ${rtc-dir}/GripperManipulation.cpp, ${rtc-dir}/GraspControllerSkel.cpp を追加。
- headers に ManipRtc.h, ${rtc-dir}/GraspController.hh, ${rtc-dir}/GraspControllerSVC_impl.h, ${rtc-dir}/GripperManipulation.h, ${rtc-dir}/GraspControllerSkel.h, ${rtc-dir}/GraspControllerStub.h を追加。
- add_definitions に -fPIC -O2 -I/usr/include -I/usr/include/rtm/idl -I. を追加。
- target_link_libraries に uuid dl pthread omniORB4 omnithread omniDynamic4 RTC coil を追加。
- if(UNIX)と、対になるelseif(MSVC)~endif(UNIX)までの行を削除。
ビルドと動作確認
初めの一回は、Choreonoid ディレクトリで ccmake を実行する。
% ccmake .
GRASP_PLUGINS に GripperManipulation を追加して、configure と generate を実行すると、Makefile が作成される。
make して、lib/choreonoid-0.9/libCnoidGripperManipulationPlugin.so が無事にビルドされたら、動作確認を行う。
Choreonoid と RT System Editor を起動して、NameServer の127.0.0.1 の(ホスト名)|host_cxtの下に、GripperManipulation0|rtc があることを確認する。
これを System Diagram 上にドラッグ&ドロップできれば成功である。
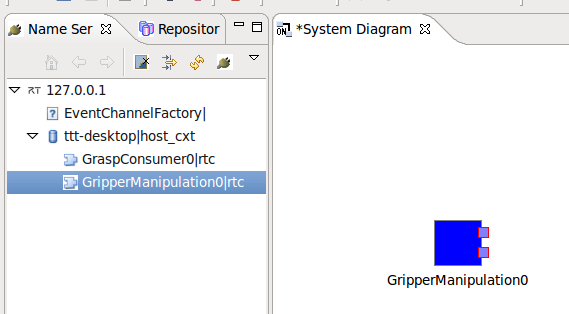
(ただし、これを他のRTコンポーネントと結びつけても、まだ何も起こらない。)