RTCPCL のコンパイル
木, 09/22/2011 - 16:52 — asahi
(http://pointclouds.org/downloads/linux.html より)
(元々の転送量、約2Mバイトを20Mバイトに修正した例…すなわち、末尾に0を付加)
まず CMakeLists.txt を修正します。
REQUIRED を削除して、「find_package(OpenRTM 1)」に変更。
1.42.0 を 1.40 に変更。
最初は「EMPTY CACHE」としか出ないので、cキーを押して configure します。いきなりエラーが出ますが、無視してeを押し、先に進みます。
DDS_SUPPORT がONになっているはずなので、カーソルを合わせてENTERキーを押し、OFFに変更してください。
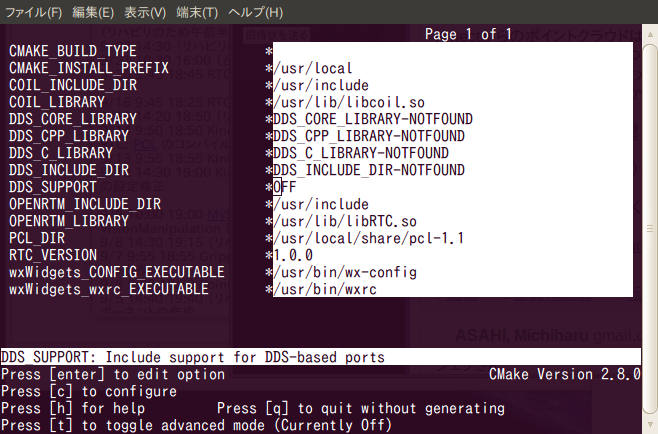
configure を二回繰り返すと、「Press [g] to generate and exit」という項目が現れます。gキーを押すと、 Makefile を生成して ccmake が終了します。
の行を #if defined で囲みます。
rtcpclcuboid/rtcpclcuboid.cpp の103行めと、rtcpclrainbowtube/rtcpclrainbowtube.cpp の134行めにある、
この行も同じようにして囲みます。
rtcpclnormals/rtcpclnormals.h の43行目、rtcpclplanesegmentation/rtcpclplanesegmentation.hの43行目の、
の直前の行に、#undef を挿入します。
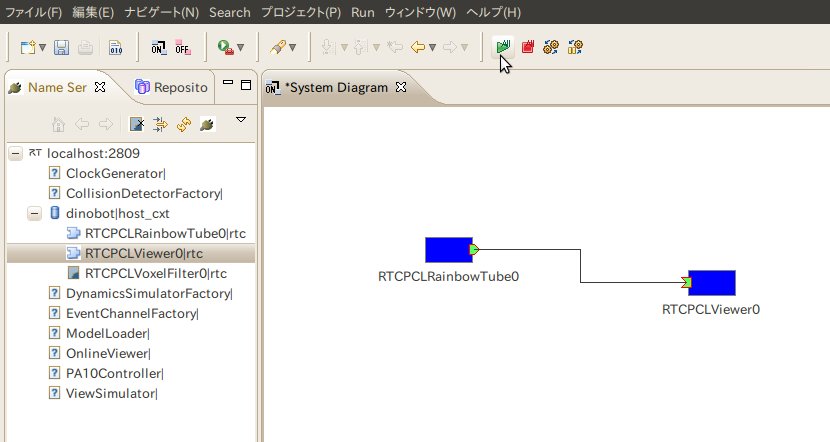
Eclipse の RTシステムエディタ 上にふたつのコンポーネントを配置し、接続して All Activate します。
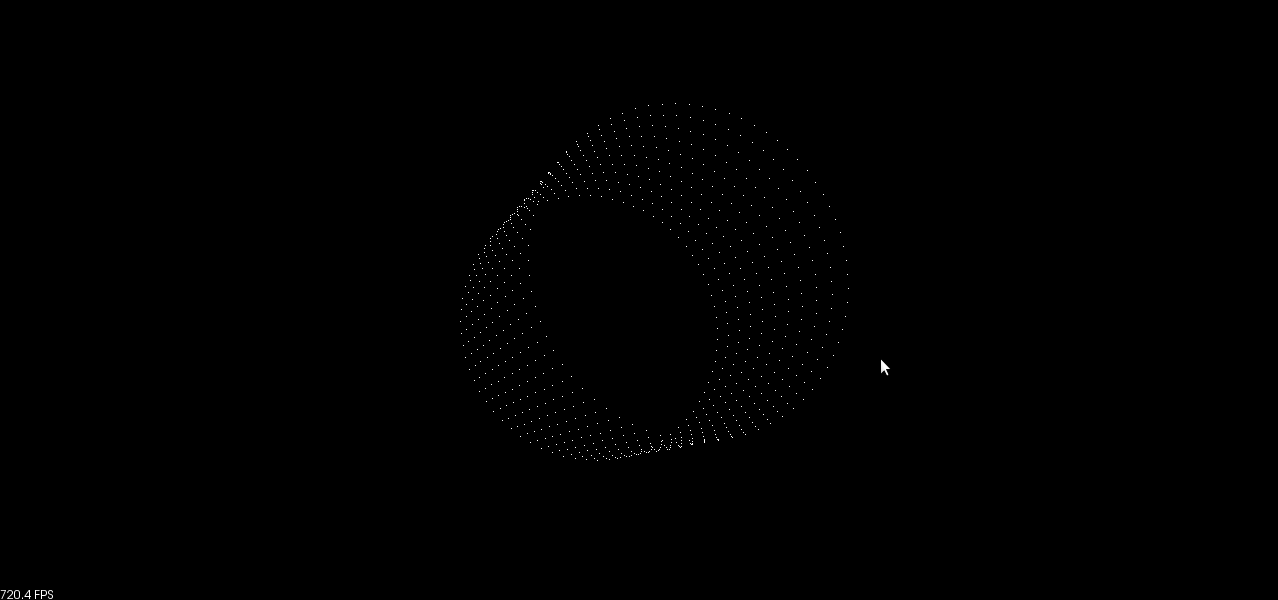
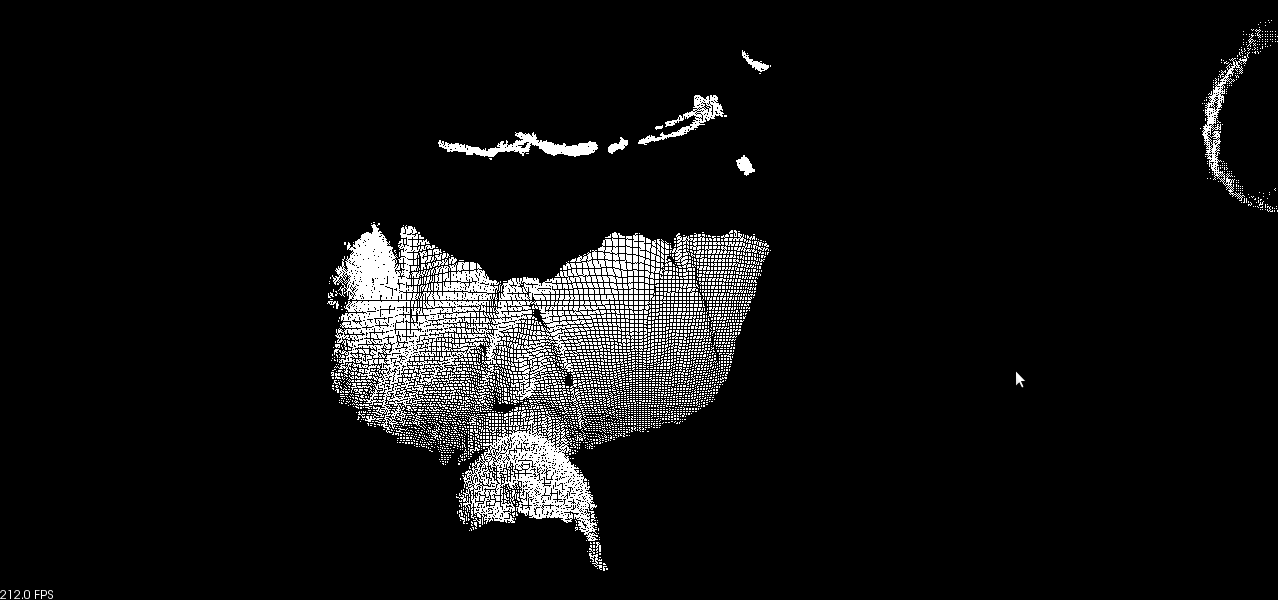
RTC::PCLViewer ウインドウが開いて、このような画像が出れば成功です。
マウスのホイールやドラッグの操作で、カメラの角度を変えられます。
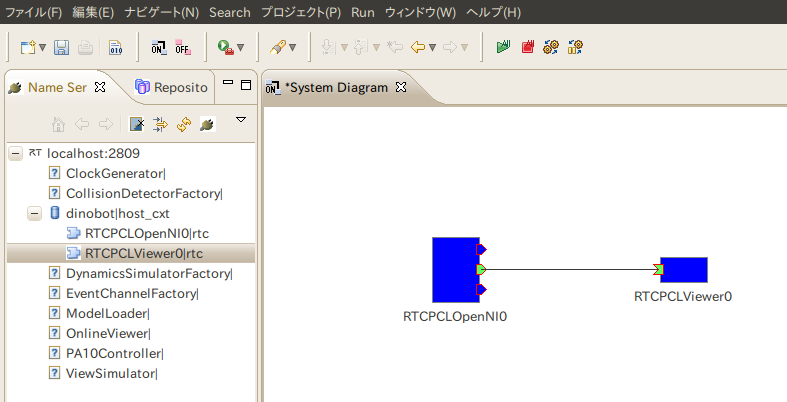
RTシステムエディタで、RTCPCLOpenNI0 コンポーネントの中段のデータポート corba_xyzrgb と RTCPCLViewer0 につなぎます。
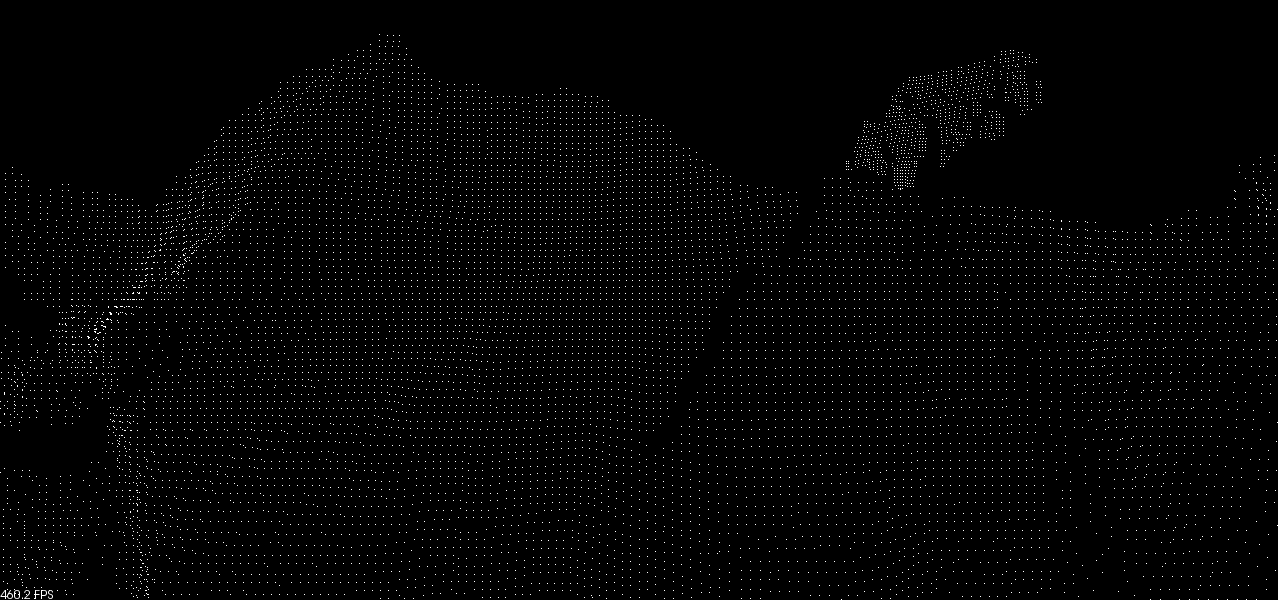
All Activate して、何かもやもやした無数の点の画像が表示されれば成功です。
カメラを操作すると、逆さまに映っているのがわかります。(Kinectの座標系がカメラ座標系であるため)
この場合は、デバイスのパーミッションを変更します。
/dev/bus/usb/xxx/xxx の値はPCによって違うので、よくエラーメッセージを見てください。
Point Cloud Library を利用するためのRTコンポーネント RTC::PCL を、Ubuntu 10.04 でコンパイルしています。
http://openrtm.org/openrtm/node/1710
必要なもの
PCL
Ubuntu 10.04 では、レポジトリを登録することで apt-get が利用できます。
sudo add-apt-repository ppa:v-launchpad-jochen-sprickerhof-de/pcl sudo apt-get update sudo apt-get install libpcl-1.1-dev
(http://pointclouds.org/downloads/linux.html より)
OpenRTM-aist
1.0 と 1.1 に対応しています。
ccmake
2.8を使っています。
下準備
omniORB.cfg
ポイントクラウドの大量のデータを送受信するために、CORBA の転送量を増やします。
/etc/omniORB4.cfg (環境によっては /etc
/omniorb/omniORB.cfg )の、giopMapMsgSize を修正します。
giopMaxMsgSize = 20971520
(元々の転送量、約2Mバイトを20Mバイトに修正した例…すなわち、末尾に0を付加)
再起動の必要はありません。
.bashrc
~/.bashrc に、以下の一行を追加して、新しい端末を開いてください。export LD_LIBRARY_PATH=/usr/local/lib
ソースの入手と修正
git を使って、ソースをダウンロードします。
git clone https://github.com/gbiggs/rtcpcl.git
まず CMakeLists.txt を修正します。
find_package(OpenRTM 1 REQUIRED)
REQUIRED を削除して、「find_package(OpenRTM 1)」に変更。
find_package(Boost 1.42.0 REQUIRED regex)
1.42.0 を 1.40 に変更。
コンパイル
git でソースを展開したディレクトリに入り、build ディレクトリを掘ってそこに入り、ccmake を実行します。
% cd rtcpcl % mkdir build % cd build % ccmake ..
最初は「EMPTY CACHE」としか出ないので、cキーを押して configure します。いきなりエラーが出ますが、無視してeを押し、先に進みます。
CMake Error at
/usr/share/cmake-2.8/Modules/FindPackageHandleStandardArgs.cmake:70
(MESSAGE):
REQUIRED_VARS (missing: DDS_INCLUDE_DIR DDS_C_LIBRARY DDS_CPP_LIBRARY
DDS_CORE_LIBRARY VERSION_VAR)
Call Stack (most recent call first):
cmake/Modules/FindDDS.cmake:73 (find_package_handle_standard_args)
CMakeLists.txt:32 (find_package)
DDS_SUPPORT がONになっているはずなので、カーソルを合わせてENTERキーを押し、OFFに変更してください。
configure を二回繰り返すと、「Press [g] to generate and exit」という項目が現れます。gキーを押すと、 Makefile を生成して ccmake が終了します。
ソースの修正
pc_type/pc_mgmt.cpp の29行めにある、#include <pointcloudSupport.h>
の行を #if defined で囲みます。
#if defined(DDS_SUPPORT) #include <pointcloudSupport.h> #endif
rtcpclcuboid/rtcpclcuboid.cpp の103行めと、rtcpclrainbowtube/rtcpclrainbowtube.cpp の134行めにある、
PointCloudTypes_PointCloudTypeSupport::delete_data(dds_out_);
この行も同じようにして囲みます。
#if defined(DDS_SUPPORT)
PointCloudTypes_PointCloudTypeSupport::delete_data(dds_out_);
#endif
rtcpclnormals/rtcpclnormals.h の43行目、rtcpclplanesegmentation/rtcpclplanesegmentation.hの43行目の、
#include <pcl/features/normal_3d.h>
の直前の行に、#undef を挿入します。
#undef LOGGER_H #include <pcl/features/normal_3d.h>
make
build ディレクトリ内で、 make を実行します。
make が通ったら、make install してください。
% make % sudo make install
サンプルの実行
端末からRainbowTube サンプルと、Viewer サンプルを実行します。
% RTCPCLRainbowTube_standalone & % RTCPCLViewer_standalone &
Eclipse の RTシステムエディタ 上にふたつのコンポーネントを配置し、接続して All Activate します。
RTC::PCLViewer ウインドウが開いて、このような画像が出れば成功です。
マウスのホイールやドラッグの操作で、カメラの角度を変えられます。
次に、OpenNIサンプルを試します。
RTシステムエディタで All Deactivate して、RTCPCLRainbowTube0 を削除したら、端末から OpenNI サンプルを実行します。
% RTCPCLOpenNI &
RTシステムエディタで、RTCPCLOpenNI0 コンポーネントの中段のデータポート corba_xyzrgb と RTCPCLViewer0 につなぎます。
All Activate して、何かもやもやした無数の点の画像が表示されれば成功です。
カメラを操作すると、逆さまに映っているのがわかります。(Kinectの座標系がカメラ座標系であるため)
libusb が Permission denied エラーを出す場合
RTCPCLOpenNI をアクティベートすると、次のようなエラーが出る場合があります。
vision@hiro-console:~/asahi/choreonoid-1.0.0/extplugin/graspPlugin/PCL$ RTCPCLOpenNI_standalone libusb couldn't open USB device /dev/bus/usb/002/005: Permission denied.
この場合は、デバイスのパーミッションを変更します。
% sudo chmod 666 /dev/bus/usb/002/005
/dev/bus/usb/xxx/xxx の値はPCによって違うので、よくエラーメッセージを見てください。