VisionManipulation RTC を作る
水, 07/27/2011 - 14:13 — asahi
端末にModelIDを表示し、recogSDL_service を通して recognize_by_ID メソッドを呼んでいます。
次に、呼び出し元のVisionManipulation.py を開きます。
初期化の時に、SchedulerService_i のインスタンスに、recogSDL_service をセットしてやります。
onInitialize メソッドの最後(return RTC.RTC_OK の前の行)に一行追加してください。
そうして、onExecute メソッドでデータポートを監視します。
コードは以下のようになります。
今回は、流れてきたデータをそのまま端末に表示しているだけですが、いずれこれを整形して PlanStartPort に渡すなどの処理を追加する必要があるでしょう。
いよいよ本体の VisionManipulation RTC の作成に入ります。
MyScheduler RTC からの setModelID の呼び出しを受けたら、VVVRecogTrigger RTC にこのコマンドを飛ばし、結果を recogResult データポートで受け取って表示するRTコンポーネントです。
概念としてはこういう形になります。
RTC Builder
設定する項目だけ列挙します。設定の仕方の詳細は MyScheduler RTC を作る を参照してください。
Eclipse プロジェクト名: VisionManipulation
基本タブ
- モジュール名: VisionManipulation
- モジュール概要: Vision Manipulation
- バージョン: 1.0.0
- ベンダ名: AIST
- モジュールカテゴリ: VMRG
- Output Project: VisionManipulation
アクティビティタブ
- onExecute: ON
サービスポートタブ
Scheduler ポート
MyScheduler の Schedulerポートとほぼ同じですが、コマンドを呼ばれる側なので方向が Provided になります。
- 表示位置 LEFT
- scheduler インターフェース
- 方向: Provided
- インスタンス名: scheduler
- 変数名: scheduler
- IDLファイル: /home/asahi/workspace/idl/VisionManipulation.idl
- インターフェース型: SchedulerService
- IDLパス: /home/asahi/workspace/idl/
recogSDL ポート
VVVRecogTrigger RTC を接続するポートです。- 表示位置: RIGHT
- recogSDL インターフェース
- 方向: Required
- インスタンス名: recogSDL
- 変数名: recogSDL
- IDLファイル: /home/asahi/workspace/idl/VisionManipulation.idl
- インターフェース型: RecognitionServiceSDL
- IDLパス: /home/asahi/workspace/idl/
以下のポートは今回は実装しませんが、今後の拡張のためにあらかじめ定義しておきます。
recogPort ポート
- 表示位置: RIGHT
- recogPort インターフェース
- 方向: Required
- インスタンス名: recogPort
- 変数名: recogPort
- IDLファイル: /home/asahi/workspace/idl/VisionManipulation.idl
- インターフェース型: RecognitionService
- IDLパス: /home/asahi/workspace/idl/
PlanStartPort ポート
- 表示位置: BOTTOM
- PlanStart インターフェース
- 方向: Required
- インスタンス名:
- 変数名: plan_start
- IDLファイル: /home/asahi/workspace/idl/VisionManipulation.idl
- インターフェース型: GraspPlanStart
- IDLパス: /home/asahi/workspace/idl/
言語・環境タブ
- 言語: Python
データポートタブ
ここでrecogResult ポートを定義します。
前回は設定しなかったタブなので、ここだけ詳しく解説します。
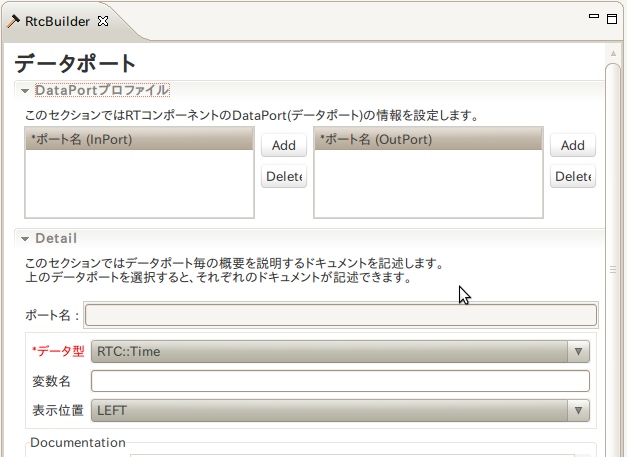
DataPort プロファイルのセクションが、「*ポート名(InPort)」と「「*ポート名(OutPort)」」の二つのリストに分かれています。
このうちのInPort側のAddボタンを押すと、ポート名リストに「dp_name」が加わり、Detail セクションにポート情報が入ります。
ポート名リストのdp_nameをクリックすると名前の変更ができるので、ポート名 recogResult を設定します。
すると、ここで設定したポート名がDetailセクションのポート名として反映します。
さらに、Detail セクションの項目を以下のように設定します。
- データ型: RTC::TimedDoubleSeq
- 変数名: recogResultIn
- 表示位置: RIGHT
このとき、データ型が選択できないことがあります。
そのときは、RtcBuilder にIDLファイルのパスを設定します。
メニューバーからウィンドウ~設定を選び、左のツリーからRtcBuilderを選択します。
すると「データ型: IDL File Directories」というリストが現れます。
右の「新規」ボタンを押して、場所に「/usr/include/rtm/idl」を追加します。
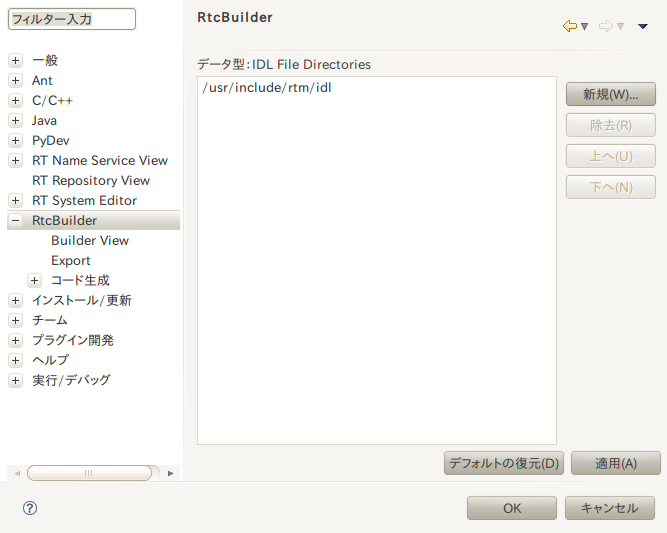
そうすると、IDLファイルからデータ型を読み込んで、たくさんの候補が選択できるようになります。
これで、倍精度浮動小数点数の配列が流れてくる入力データポート、recogResult が定義できました。
コード生成
BuildViewはこのような形になっています。
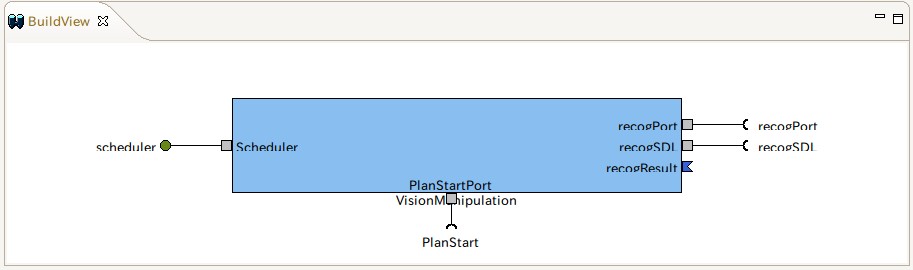
コード生成を行ってください。
「'SchedulerService' is not found in IDL」が出るようなら、IDLのinclude文をコメントアウトします。
端末からの設定
VisionManipulation.conf の内容を以下のように修正して、rtc.conf にシンボリックリンクを貼ります。
corba.nameservers: localhost:2809
exec_cxt.periodic.rate: 10
次に、idlcompile.sh を実行します。
エラーが出る場合は、スクリプトのコマンドラインに -I/usr/include を挿入して、やり直してください。
実装
MyScheduler RTC が setModelID を呼び出すと、VisionManipulation では SchedulerService_i::setModelID が呼び出されます。
そこで、VisionManipulation_idl_example.py の該当部分を以下のように修正します。
# void setModelID(in long ModelID)
def setModelID(self, ModelID):
print "setModelID: %s" % ModelID
coord = self.recogSDL_service._ptr().recognize_by_ID(ModelID)
print "recognize_by_ID: %s" % coord
端末にModelIDを表示し、recogSDL_service を通して recognize_by_ID メソッドを呼んでいます。
その結果はデータポート recogResultIn で受けることになります。
ところで、self.recogSDL_service はまだ定義していません。
これは、呼び出し元からセットしてもらうことにします。
SchedulerService_i クラスに新しいメソッドを追加します。
def setRecogSDLService(self, recogSDL_service):
self.recogSDL_service = recogSDL_service
次に、呼び出し元のVisionManipulation.py を開きます。
初期化の時に、SchedulerService_i のインスタンスに、recogSDL_service をセットしてやります。
onInitialize メソッドの最後(return RTC.RTC_OK の前の行)に一行追加してください。
self._scheduler.setRecogSDLService(self._recogSDL)
そうして、onExecute メソッドでデータポートを監視します。
コードは以下のようになります。
def onExecute(self, ec_id):
if self._recogResultIn.isNew():
print "resultIn:"
indata = self._recogResultIn.read()
val = indata.data
print val
print "\n"
time.sleep(0.01)
return RTC.RTC_OK
今回は、流れてきたデータをそのまま端末に表示しているだけですが、いずれこれを整形して PlanStartPort に渡すなどの処理を追加する必要があるでしょう。